Robot design and implementation
We have expertise in the creation of robots for different medical fields. We assist you from the design phase to the production and assembly of your robot and from the computation of inverse kinematics to the deployment of the final robot in the operating room
Mechanics design
We design robotic arms, robotic tools and teleoperation consoles
Control software
We develop low and high level control software for custom robots
Integration
We support you in the integration of your surgical robot
Final adjustment
We know that sometimes things do not work out of the box
Teleoperation console
We adapt our control console to your needs so that you can quickly integrate it with your robot to speed up its development

EASY INTEGRATION
Choose between USB, HID, Serial, or CAN-bus commmunication protocol with support for Linux and Windows or define your own protocol
SPEED UP DEVELOPMENT
Test your architecture and slave robots since the beginning of the development. Take the console to your users and not the other way around
FOCUS ON USABILITY
Take advantage of a well established design to provide your users an ergonomic setup with all the required adjustments
CUSTOMIZABLE
Customize the appearance of the console and extend it with additional controls and functionalities to make the usage of your robot more intuitive
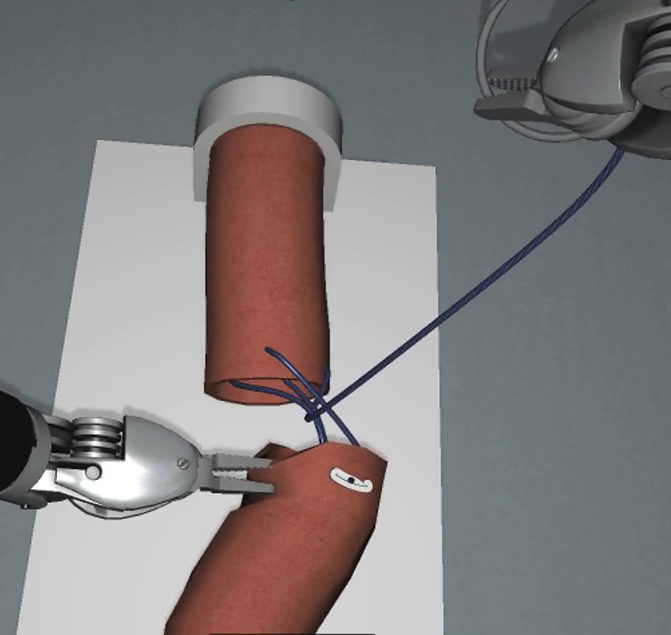
Simulation software
We integrate your robot in our software to allow you simulating your robot in realistic environments to evaluate its effectiveness or to showcase it to your customers
DESIGN AND SIMULATE
Easily configure your robot with simple script files. Change kinematics parameters, link 3D models and joint specifications to find the best configuration
SAFELY TEST
Quickly test your control algorithms and strategies in a safe environment without the risk of damaging your robot and with realistic tasks
SHOWCASE YOUR ROBOT
Showcase your robot without the need for the robot. Combine our software with our console and get a compact traveling demo unit
Twee
Twee is a wireless and lightweight additional analog degree of freedom for your Touch™. Snap it on the Touch™ jack and add few lines of code to your project to sense Twee opening angle and switch state.

SENSOR
Maximum opening angle: 30°
Resolution: 3°
Extra: digital button
Sampling rate: 30Hz
INTERFACE
Connector: 6.35mm jack (compatible with 3D Systems Touch™ and SensAble PHANToM OMNI® or Geomagic Touch®)
Software interface: duty cycle encoding of sensor reading
BATTERY
Type: 2 removable ZINC AIR P675 (or equivalent)
Life: 6 months (considering 8 hours per day and 20 days per month – actual life may vary)
MISCELLANEOUS
Dimensions: 22×22×90mm
Weight: 40g (including batteries)
Material: Nylon
Portfolio
These are some of the project in which BBZ has or had an important role. For confidentiality reasons, we cannot disclose customers name and details of many projects.

Ergonomics of new laparoscopic robot
Design and implementation of a custom console for the optimization of ergonomics during robotic surgery with a new robot

Robotic surgery planning assistant
Design and implementation of a custom console for the development of a software for robotic surgical planning

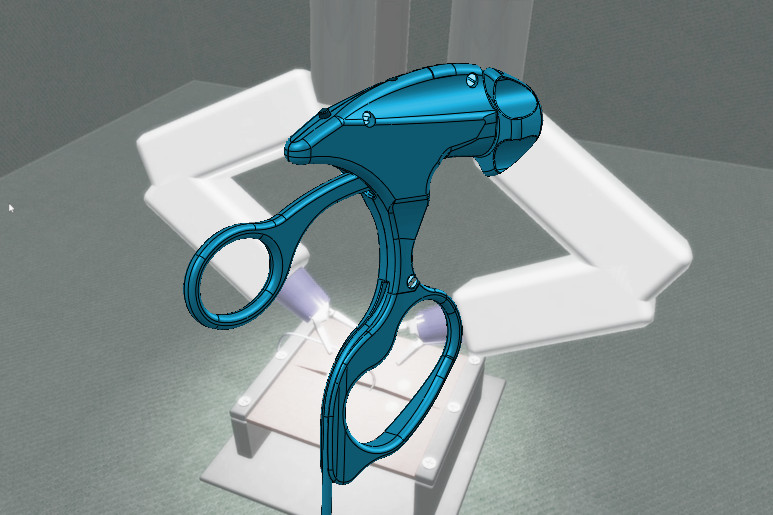
Innovative laparoscopic robot
Design of a custom control console and implemtnation of a virtual environment for the rapid prototyping of a new surgical robot

US-guided prostate biopsy
Design and implementation of a robot for the precise and repeatable positioning of prostate biopsy needles under ultrasound guidance
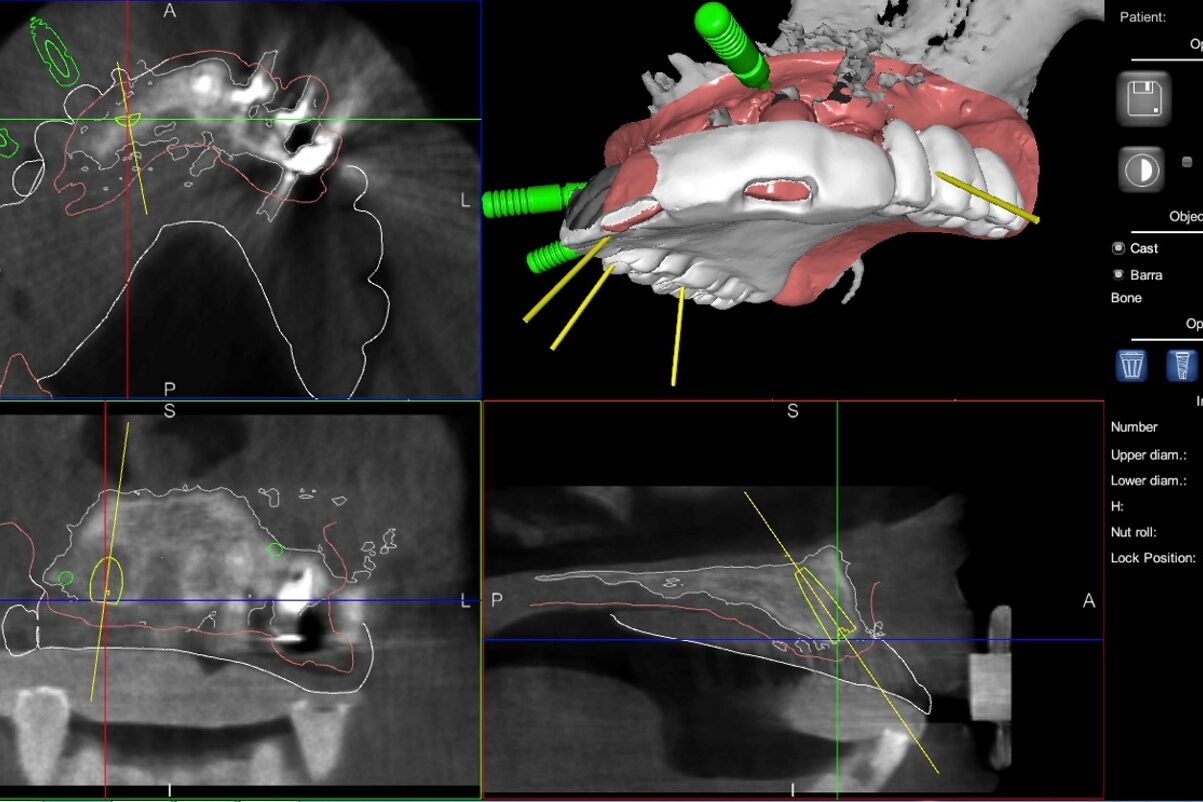
Valtech – Dental implant planner
Implementation of a browser-based dental implant planner with CAD/CAM interface. The planner runs in the broswer, with no need for installation
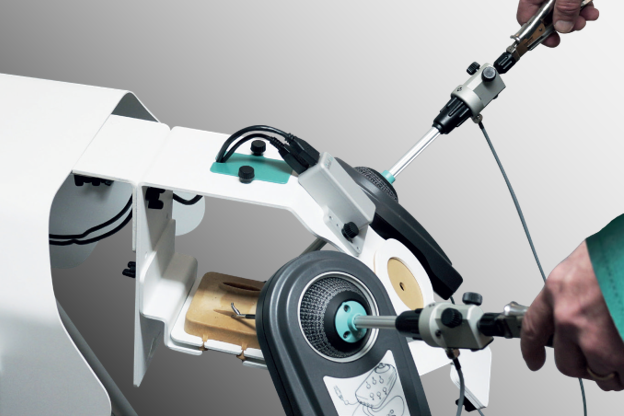
GCoder – Simball Box
Implementation of the data collection, visualization and sharing software for a laparoscopic surgery training system

Posture evaluation
Design and implementation of a sensorized platform for posture measurement
Reconfigurable surgical robot
Design and implementation of a reconfigurable surgical robot. Implementation of control algorithms and of a virtual environment for the rapid prototyping of different robot configurations
Contact us
If you want more information or for a quotation.